Roman
-
Posts
7,233 -
Joined
-
Last visited
-
Days Won
39
Content Type
Forums
Downloads
Events
Gallery
Everything posted by Roman
-
Be sure to record all of the numbersand post them here... maybe some graphs?
-
Did Jonno tune this?
-
Sooooo.... 56 pages and 651 days later, I'm finally putting an exhaust on it @kpr's awesome awesome awesome manifold fits up great. Thankfully it could fit in from under the car, without having to undo engine mounts or anything. It sits a little too low with the 1300cc motor in there, as the block is shorter. But it will be perfecto once I get a new prius engine. Which I'll get next week. Enjoy some tractor noises!

-
I was like "Oh cool a thread about a nice low km modern car, will be nice to see some pics of it going on adventures etc even if it just stays standard and doesnt need any work" Next few posts down:
- 15 replies
-
- 13
-

-

-
-
holy shit haha. that's outrageously expensive. Is there anything special about it to justify the price?
-
I set the intake cam 1 tooth back on the chain, and then used a small stopper inside the pulley to limit the last few degrees of travel. So the stopper limits the total travel to around 37 degrees instead of 40ish, and moving the cam back 1 tooth means it gets to +17 deg instead of +37. So this gets as close as it could to the top of the piston without modification. My new home position for the cam is effectively -20 deg However it worked out well, because at high rpm I'm actually retarding the cam further than it would normally be able to go. Effectively at -7 degrees by 9000rpm. And yes it says "forged rods" on wikipedia but I dont think 1NZFXE has anything special compared to normal 1NZ. Just "wikifacts" they are still pencil sized haha.
-
10.5:1 static comp, dynamic varies with vvti.
-
Im just tossing this up. Because the bellhousing situation with the newer motor isnt really as bad as I first moaned about. What I thought was a missing top bolt that is supposed to go through to my engine simply doesnt exist on the normal block either. So there are only two bolts that arent great. One, instead of just drilling this time. I could drill smaller and use a tap, and it would be super legit. The other side is less great though, but could be figured out. The dowels hold it all correctly, and Ithink ive given it enough of a beating to prove it works well enough. I guess im concerned that the only earlier motors I can find look a bit grotty and have been sitting on trademe for a looooong time. Where as the newer motors, I know exactly what im in for. With a newer motor theres less chance of spending the contributed money on a motor that might be a dud. Also I can go back to dodsons and see if they will sell me another one for a little cheaper without warranty again. No such luck with the older motors from a different wrecker, that are more expensive to start with. And might be fucked. Hmmm.
-
No at the moment it's considerably slower than when I had the standard cams with ITB on. Something is wrong but I'm quite sure what. I've checked plugs and cam timing and injectors. Seems like it's running on all cylinders fine. I think I might need to do a compression test. Maybe one or more of the valves is leaking a little. It actually kind of feels like when I'm doing the VVTI tests, and you set the cam to 40 degrees advance. When you do this the motor can barely get to the redline, it feels so sluggy. Currently it feels like that everywhere. I am wondering if it would perform a lot better with the intake cam 1 tooth back on the chain, like my previous motor had. It's also got a more grumpy idle, like what happens when you advance the cam too much at idle. Weird. I guess it still could possibly be 1 tooth out on the crank end of the chain. As that's hard to check 100% without the cover off. Dunno. I've exhausted the easy options and CBF is setting in. I might just pull the exhaust out and start planning for the new manifold.
-
Yeah the idle is a bit rough as well, basically I've got a 4k with a 3/4 race cam.
-
I got the 1300cc motor running with the big cams/ITB/etc. Something is definitely quite wrong at the moment! It feels like 1/4 throttle compared to before. For some reason, its super garbage right now. More than can be explained by the lower displacement and compression. I'm thinking it's either running on 3 cylinders at higher load or maybe the cam timing is wrong. The coloured links on the timing chain were very faint. It's possible that I'm a tooth out on the crank. Which is annoying, because its a big pain in the ass to check it or adjust it. It's only another week until I should have $$ for another Prius motor turning up. Not sure if I can be bothered troubleshooting this a bunch in the meantime.
-
Is there line of sight from this exhaust pipe to your radiator? It might just be beaming radiant heat directly into your radiator. Which being all alloy, it just loves to soak up. Should be pretty easy to test, just need pretty much anything that breaks line of sight between the parts will help. With an air gap away from both parts ideally. Thin shiny stainless steel sheet would be ideal if there's any around you can just cable tie to your engine bay or something.
-
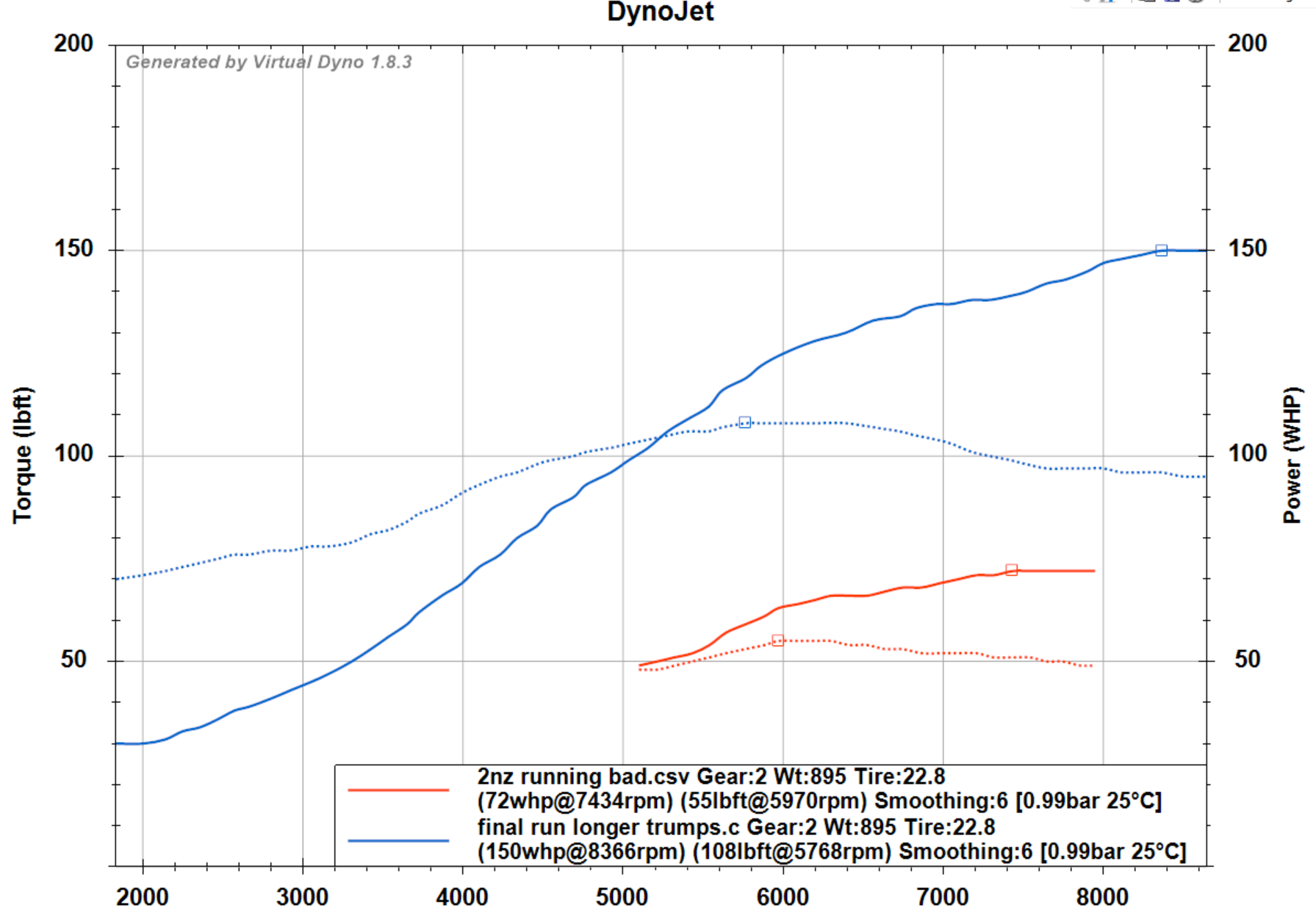
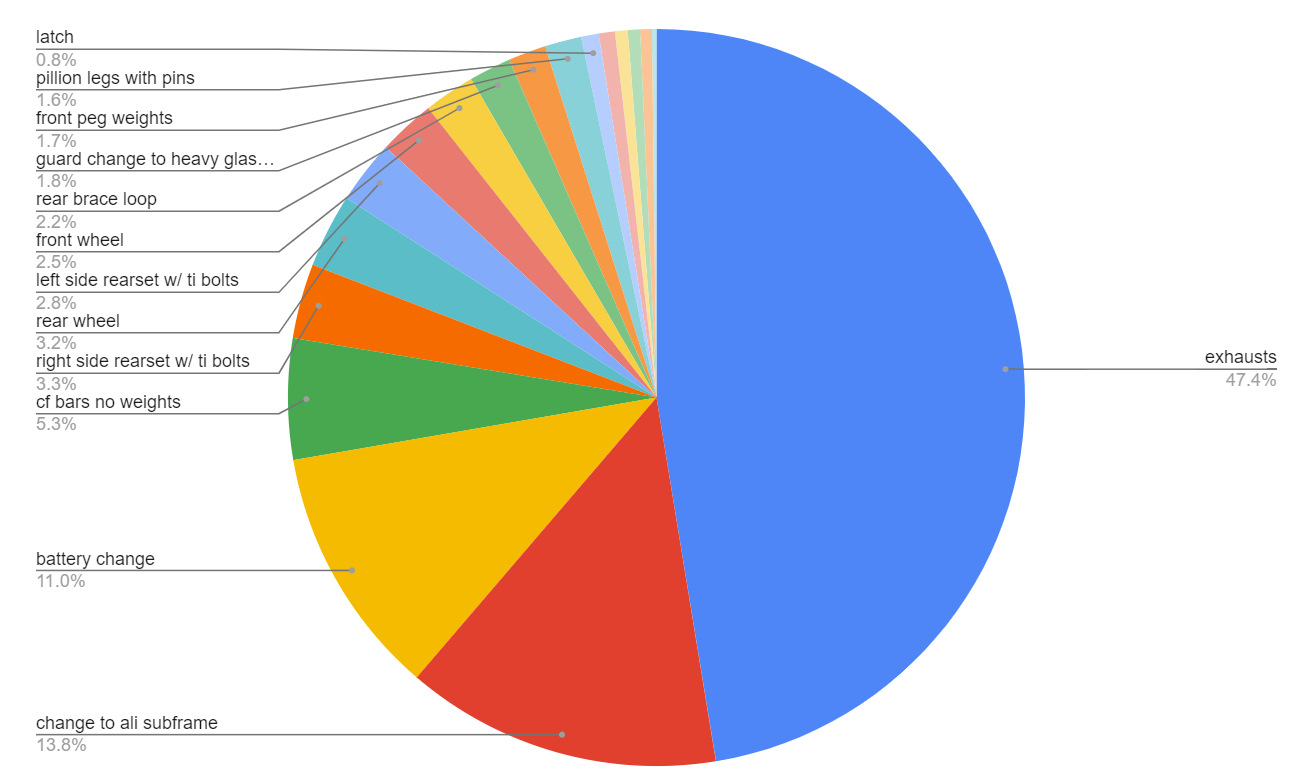
Once my new motor is here, I'll get it fitted up and get a brace welded on to somewhere sturdy on the block. Which might also double as something to help hold the rods in Someone on Instagram messaged me to say they made a long pipe setup for their starlet which has a 1NZ. Quite a cool install, like so: In his words: "The stock 1nz made 105 hp on de dyno and in combination with a 2.5 inch exhaust and manifold, it ran 127 hp" So that's a pretty epic gain! Especially with the dunga intake manifold still on it. This doesnt imply I'd get the same % amount of gain when I'm already making more power, but it looks promising to at least get a bit more zing out of it. Still need to buy some parts to finish an exhaust, once this arrives. -straight pipe -bends -flexi join -o2 sensor bung (Pretty sure I've got one somewhere, but no idea where) -muffler(s) Does anyone have any reccomendations on good price point for reasonable quality stuff? I'm thinking since it's going to have a big pipe on it, probably need to spend some money on quality parts for mufflers to help keep the noise down a bit.
-
Far out. I can honestly say I never thought I'd have a fabricated exhaust manifold of this quality, on ANY car, and I certainly never imagined I'd have one like this on the Echo haha. Cant express how awesome this is. Cant wait to get it finished and fired up!
-
Wow! Probably cant get a working T50 for that anymore haha
-
New VVTI install looks awesome. Reading first page of this thread, posted in 2007 - when you said you've had the car for a couple of years. Must be coming up to nearly 20 years with this car!
-
Far out, looks so good! It doesnt look so worryingly long now that the 4 pipes are on there haha. Looks more like it belongs on an F1 car than an Echo
-
KPRs dyno testing shows exact opposite of all this on a variety of 4AGE combinations. 3" pipe gains power everywhere, over a smaller pipe. And actually surprisingly picks up the most gains in midrange. Then headers only makes slightly more power than that. About the gas losing its velocity, I've heard that mentioned a lot but I dont think this makes sense. Because if you double the rpm, you double the velocity of the gas in the pipe. So if this held true you'd expect a 3" pipe to gain top end when the airspeed is higher again, and lose midrange. But it doesnt happen, the opposite does.
-
A lot of the hypermiling nerds cover up the whole front of their car and make sure the motor gets real hot intake air. What grade fuel are you putting into it? If the motor is knocking because air temp is hot, then it pulls timing. Yeah that will cost you some economy. Would be interesting to put an OBD2 wifi thingy into the car, and compare some before and after results for things like how much ignition timing, IAT etc.
-
Yeah so the cat converter rules are interesting. You could have one 2005 car that needs it, and one 2005 car that doesnt. Because it depends on the year the car was imported. In my case, no cat converter required.
-
Looks so good! This is possibly going to be the best exhaust any Vitz/echo/yaris/whatever has ever had haha. I love it. Cant wait to get it all together and running. Thanks heaps.
-
On a diesel you are essentially at full throttle all of the time, so there arent pumping losses from working against the vacuum in a cylinder on the downstroke at part throttle. EGR in a petrol means that when your demand is low (low throttle) you are reducing the amount of vacuum, so you get some slightly increases in economy. However yeah, generally the ignition timing will the different as well. Because adding EGR means the mix isnt just oxygenated air, and fuel. Now there's de-oxygenated exhaust gas in there too mixed up with it. So the flame front expands out from the spark plug slower, so you need more ignition timing. So if you remove EGR, you might have a bit too much ignition timing at cruise. When in the past I've made the motor run a leaner air fuel mix, which is sort of similar to keeping normal AFR and adding EGR. It wanted 9 degrees more timing at cruise conditions.
-
Hot air isnt a bad thing for fuel economy.
-
Haha yeah, I guess that's also assuming you could get that 18psi to ambient air temp. My solution to the problem, and possibly all problems, is simply to keep revving it higher. Lets just disregard that this is also the cause of all my problems
-
Ummm my friend said he couldnt wait so wanted me to show you this
- 175 replies
-
- 19
-
-
-