h4nd
-
Posts
10,656 -
Joined
-
Last visited
Content Type
Forums
Downloads
Events
Gallery
Everything posted by h4nd
-
Here's a good description (in the old 'introducing Chrome" style comic) on why Chrome is turning to shit https://contrachrome.com/ Google make bajillions selling ads. In short, google made new policies for chrome that make the adblockers stop working.
-
Alphabet/Google/Youtube is doing fuckery to make YouTube videos run bad on Firefox - so you use their Spyware browser (Chrome: it used to be great, now they own the market, they're making it serve them, not you) This extension fixed it for me: https://addons.mozilla.org/en-US/firefox/addon/enhanced-h264ify/
-

-
Riiight, so the new firmware in the Ultrahub takes a 10-30s holiday every 10min? - 30min? Am I doomed to re-engineer everything in the house that I touch? https://github.com/hack-technicolor/hack-technicolor/issues/68 (I may prob just put the new router from my fibre install for a quick trial - I mean, never mind that it'll take me 1/2 a day to reconnect all my shitty china IoT devices...)
-
The software the hardware for the software:
-
You could keep the water @90C for 'radiators'
-
Hang on, we just went thru this with Pog Pumped mini hydro? Cobble up a huge cheap brass and iron battery out of scrap? Crack H2 and store in a rubbish-bag/gasometer. I hear the (other) nerds over in EV/Climate reckin old Leaf batteries are good for houses (Don't need 60kW). Charge your neighbours EVs and make CA$H MONIES?
-
That's 1 of 2 layers of defence. If it hasn't rusted shut
-
Hot water cylinder is a 20kWh battery, but you need to get the energy there with thermo switches that'll cope with DC, and also have 2 cut mechanisms so you don't make a steam bomb in your home
-
Yes, the internet is shit (victimising average users - another quality rant - long read) https://www.wheresyoured.at/never-forgive-them/
-
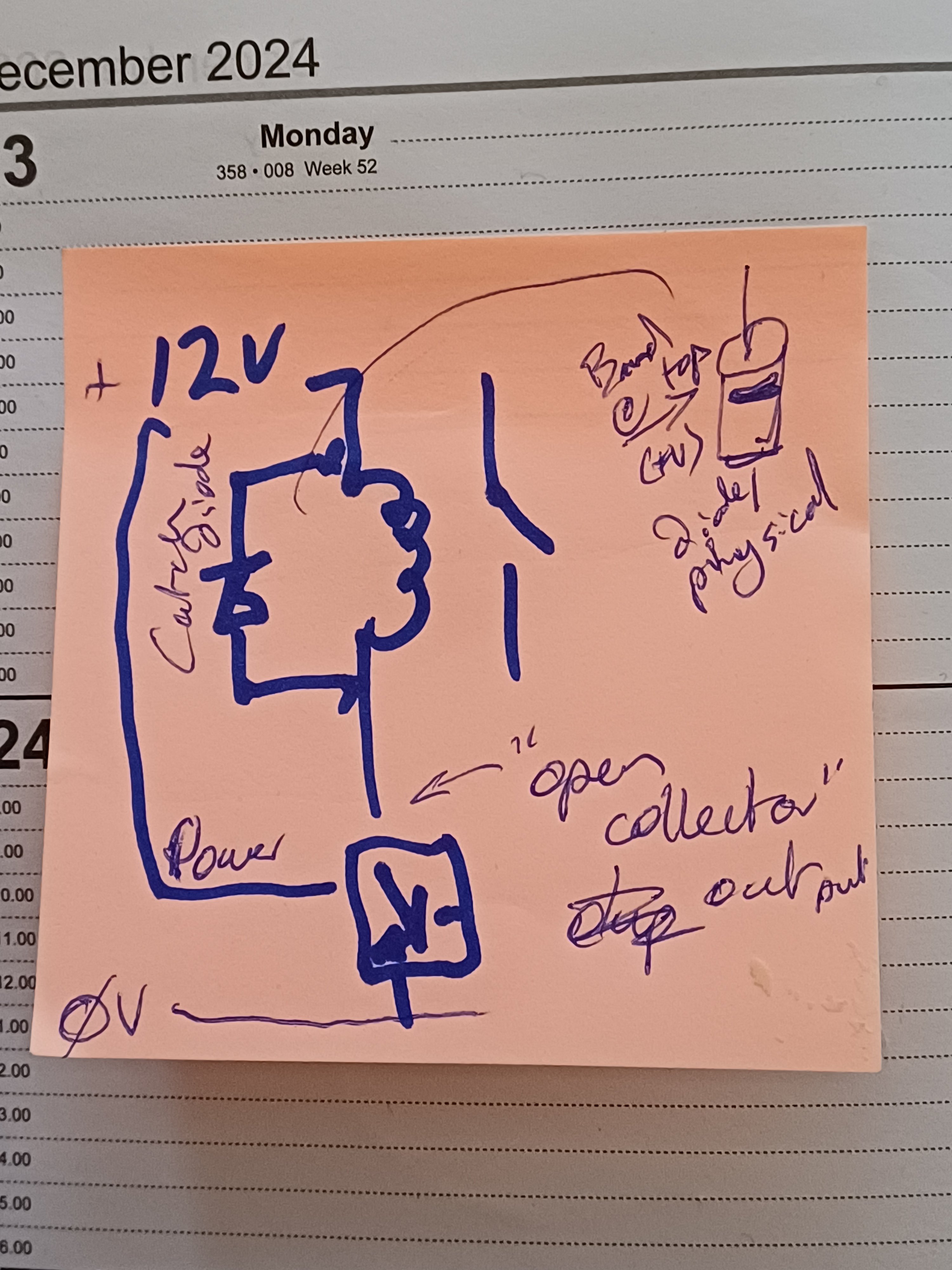
Driving a relay: often needs a 'catch diode' stop the back-emf putting 100V+ up the bum of your sensor/transistor/Arduino: Yep, Kettering ignition uses exactly this effect to get ~100V on the primary of your ignition coil, which gets a 1:100 boost across the secondary to get your 10KV spark ignition voltage. Also, it is reprehensible to make a gadget that does this for a BDSM party. And let busty goth chicks near it.
-
It turns out the car barriers at that site have multiple flaws
-
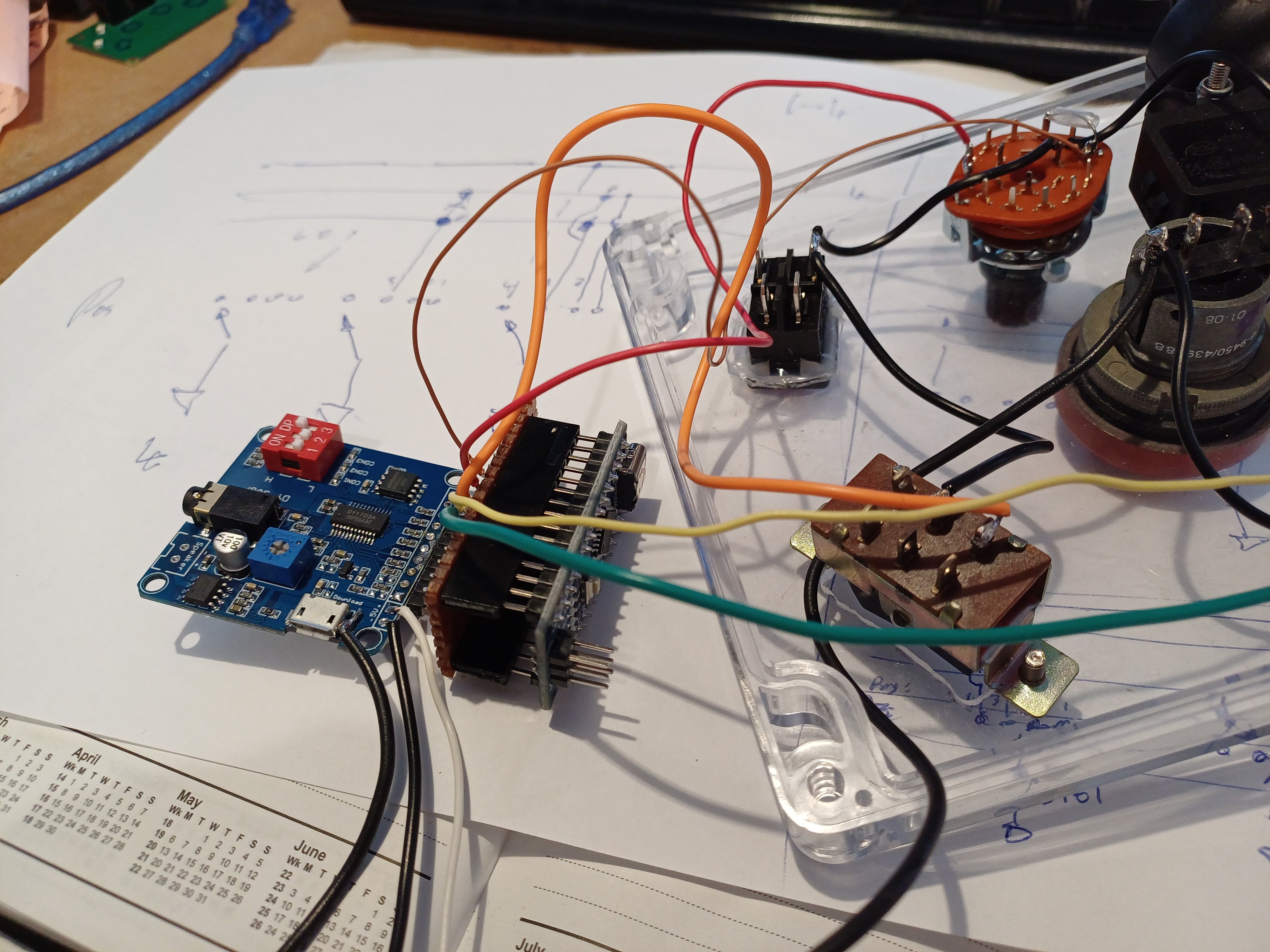
Was gonna build a noise thingy for kiddo. cheap simple noise PCB! ACE! 8 simple switch inputs, fuck yeah no software! should only take an hour in this mode each button plays noise 1-8 - sweet, but need more noises! in that mode it's a binary input for 255 noises. Great. wire up - test. but it starts at 0-127 twos-complement???!?! yeah, all inverted, starts at 1 not 0. Whut?? Oh, so I'd need to space all the noise files every 2nd number if I use a button? only 1/2 the entries are usable?? huh?? oh, oh dear only 126 available then. hang on, you're not playing the intended file number! yeah, that numbering scheme? It actually ignores the number on the files, and indexes according to whatever order you put the files on the storage. whuuut? I'm gonna have to do a software, aren't I >:-(
-
Meat was ate drinks were drunk sharns were sharned
-
Quality rant:
-
Either good for me.
-
Cough titanium crank Cough cough
-
Anyone want a new baby desktop SMT pick and place machine? https://www.qhsmt.com/product/tvm802ax-desktop-2heads-29slots-desktop-smt-pick-and-place-machine/ @ajg193 @Ned @Willdat?
-
got it covered in software. LoL
-
I wondered when you'd spot that. Either I'm very dumb, or lazy, I have a sneaky plan (or 3). Actually there's a few options, depending on what suits you. fit some external up/down buttons to spare inputs (except A4, A5) safe - normal, boring. Don't do that to me! have a laptop to send a serial string saying - up / down now! do the same with a serial interface from you phone usb port. boooring, but smaller and more portable, OR! Add a bluetooth serial module to the rig, so same as above, but wireless CAN bus? OG TV remote with 2 tuning forks and a microphone, for the whistle the right tone at it LoLs re-purpose an old TV remote, bang an IR receiver on the arduino ($2) Add a single button where you have to tap 'Fuck Trum'p in morse for it to work - y'know, a safety cognition test to prevent kids and the mentally feeble from operating it and injuring themselves or others run the motors up to see if they move. If not, you've topped out at the top, so start going down instead I'd have put current feedback on those motor drivers, but the end-stop on the actuators will be fiiine, we'll just look for 'the motor stopped turning' better yet, run the motors down unless they've stopped - if so, run them up: That way from rest you can make it go up to 1/2 way, and just power it off - then it'll come down next time. Full positional control all from just the main power switch Just put it on the power control. Wakes up in about a second. Slow for a uController, but it's got to do some bootloader fucking around. Job done, the Arduino puts itself to sleep (goes to about 10mA); then you can turn the drive system power off. The limit switches are selected through diodes, so when you run them the other way - off they go again. Nah, per last option above, the Arduino just goes, oh: drive isn't making the spinny, off we go the other way. Simples
-
Mr SuperFast has an excellent method for reverse engineering complex software protocols, at 6:10 https://youtu.be/Bea4FS-zDzc?t=370 Bigger hammer! https://www.rocelec.com/part/01t4w00000PPHFkAAP-KMA215118
-
Code nerds that way ------>
-
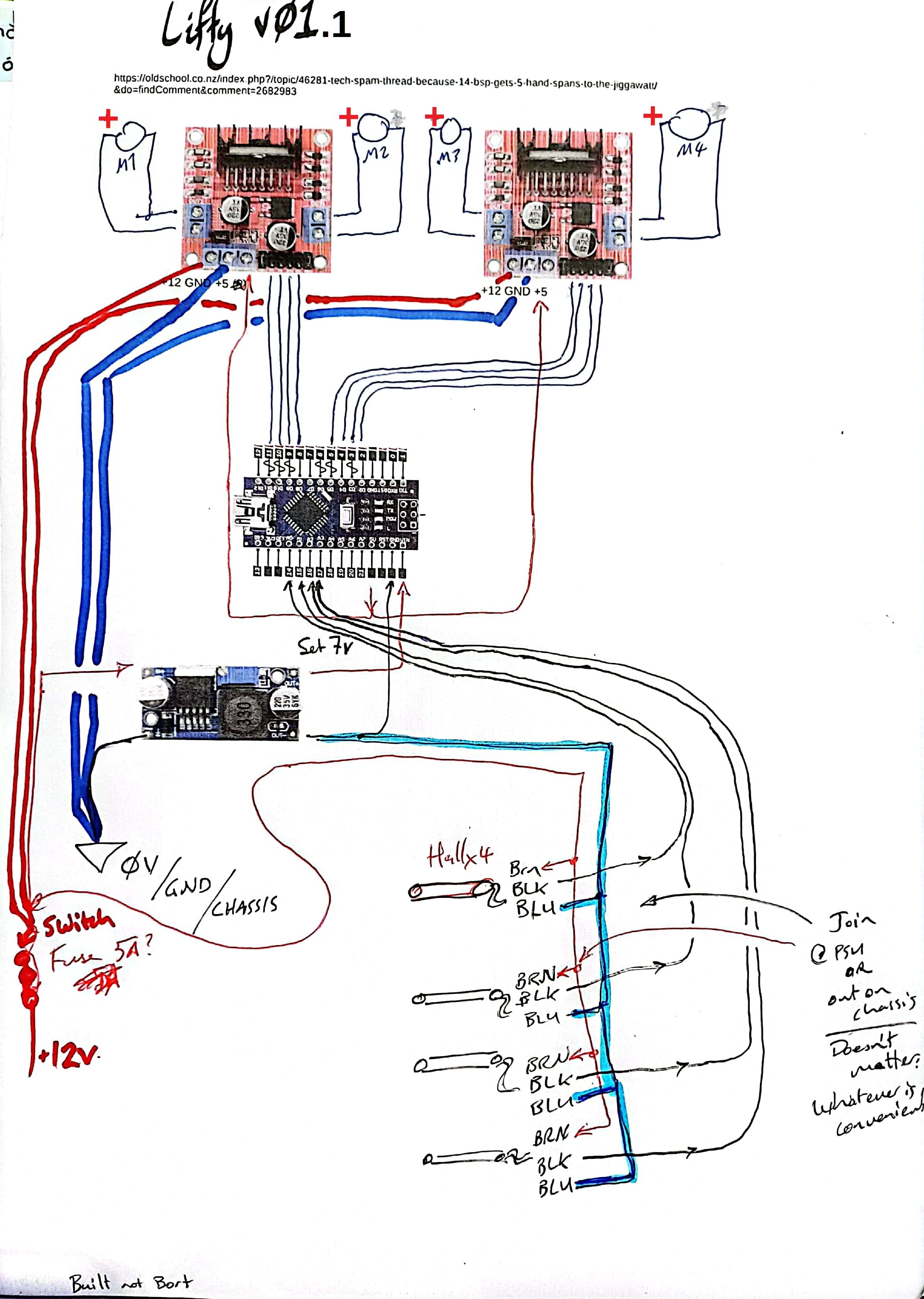
Oh yeah, here's why: ^^Note the retcon of the motor polarities. Lifty_input_test.ino // Input test // Using Analog inputs just as digital pins #define sense_pin_1 A0 #define sense_pin_2 A1 #define sense_pin_3 A2 #define sense_pin_4 A3 void setup() { // put your setup code here, to run once: Serial.begin(115200); Serial.println("\r\n Lifty input test"); pinMode(sense_pin_1, INPUT_PULLUP); pinMode(sense_pin_2, INPUT_PULLUP); pinMode(sense_pin_3, INPUT_PULLUP); pinMode(sense_pin_4, INPUT_PULLUP); } void loop() { // put your main code here, to run repeatedly: Serial.println(); // newline Serial.print( digitalRead(sense_pin_1)); Serial.print(" "); Serial.print( digitalRead(sense_pin_2)); Serial.print(" "); Serial.print( digitalRead(sense_pin_3)); Serial.print(" "); Serial.print( digitalRead(sense_pin_4)); Serial.print(" "); delay(500); // ms } Lifty_output_test.ino // Output test slow drive #define Motor1_1 11 // driver board 1-1: pwm #define Motor1_2 10 // driver board 1-2: direction #define Motor2_3 9 // driver board 1-3: ... #define Motor2_4 8 // driver board 1-4 #define Motor3_1 5 // driver board 2 ... #define Motor3_2 4 #define Motor4_3 3 #define Motor4_4 2 void setup() { // put your setup code here, to run once: Serial.begin(115200); Serial.println("\r\n Lifty output test"); pinMode( Motor1_2, OUTPUT); pinMode( Motor2_4, OUTPUT); pinMode( Motor3_2, OUTPUT); pinMode( Motor4_4, OUTPUT); } void loop() { // forward Serial.println("\r\n Forward"); digitalWrite( Motor1_2, 0); digitalWrite( Motor2_4, 0); digitalWrite( Motor3_2, 0); digitalWrite( Motor4_4, 0); analogWrite(Motor1_1, 64); // 255 steps, so 25% duty cycle analogWrite(Motor2_3, 64); analogWrite(Motor3_1, 64); analogWrite(Motor4_3, 64); delay(2000); // ms Serial.println("\r\n Reverse"); digitalWrite( Motor1_2, 1); digitalWrite( Motor2_4, 1); digitalWrite( Motor3_2, 1); digitalWrite( Motor4_4, 1); analogWrite(Motor1_1, 191); // now referencing motor drive from +ve, so need 255 - (1/4), so 75% duty cycle analogWrite(Motor2_3, 191); analogWrite(Motor3_1, 191); analogWrite(Motor4_3, 191); delay(2000); // ms } @ThePog None of this will work first time of course, what with never testing any of the code on the actual hardware. Impossiburu!
-
I drew it in CAD: Crap-Ass Design .. and sneaky post edit to fix a polarity faux-parr on the motors.